Development of a Smart Plant Watering Robot Using Soil Moisture and Light Intensity based on Fuzzy Logic Control
Downloads
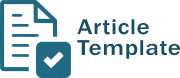
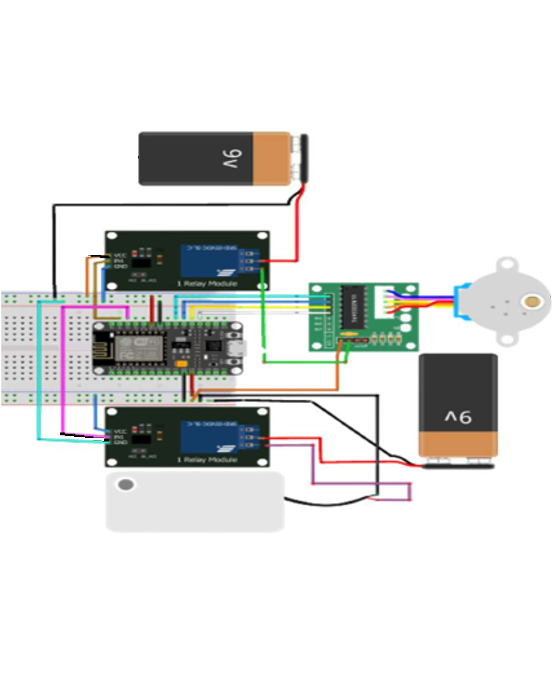
Urban agriculture offers a strategic solution to improve food security and environmental sustainability in cities. However, challenges such as limited land and inefficient irrigation often hinder its effectiveness. This research proposes a smart automatic irrigation system tailored for small-scale urban farming. The system combines fuzzy logic and a two-axis cartesian robot to deliver water precisely based on real-time light intensity and soil moisture data. The fuzzy logic controller dynamically adjusts watering frequency and volume, ensuring efficient water use. Experimental results show the robot achieved a movement error rate of only 3.63%, while the fuzzy logic system reached a decision accuracy of 93.1%. Post-irrigation testing also revealed a 94.83% average increase in soil moisture, indicating the system's ability to restore optimal growing conditions. This approach demonstrates a scalable and sustainable solution for plant care in urban settings, supporting resource-efficient and productive farming in limited spaces.
Downloads
[1] Z. Zhao et al., "Performance evaluation of capacitive soil moisture sensors under different soil conditions," Agricultural Water Management, vol. 243, p. 106416, 2021.
[2] A. Kumar et al., "Soil temperature monitoring for improved crop yield using DS18B20 sensor," Agricul-tural Water Management, vol. 250, p. 106861, 2021.
[3] B. B. Ghaley et al., "Impact of water scarcity on crop yields," Journal of Agricultural Science, vol. 158, no. 10, pp. 755–764, 2020.
[4] "Buku Statistik Konsumsi Pangan 2023," [Online]. Available: https://satudata.pertanian.go.id/assets/docs/publikasi/Buku_Statsitik_Konsumsi_Pangan_2023.pdf. [Ac-cessed: Jul. 1, 2025].
[5] N. Putu Devira Ayu Martini, N. Tamami and A. Husein Alasiry, "Design and Development of Automatic Plant Robots with Scheduling System," 2020 International Electronics Symposium (IES), Surabaya, Indo-nesia, 2020, pp. 302-307, doi: 10.1109/IES50839.2020.9231850.
[6] M. Furqan, S. Lubis, and R. Harahap, "Automatic plant watering system based on air temperature and soil humidity using the fuzzy Sugeno method," Sinkron, vol. 7, no. 10, pp. 2576–2583, 2022.
[7] J. Waworundeng, N. Suseno, and R. Manaha, "Automatic watering system for plants with IoT monitoring and notification," CogITo Smart Journal, vol. 4, no. 2, pp. 316–322, 2019.
[8] M. B. I. Astutiningtyas, M. M. Nugraheni, and S. Suyoto, "Automatic plants watering system for small garden," International Journal of Interactive Mobile Technologies, vol. 15, no. 2, pp. 200–207, 2021.
[9] M. S. Munir, I. S. Bajwa, and S. M. Cheema, "An intelligent and secure smart watering system using fuzzy logic and blockchain," Computers & Electrical Engineering, vol. 77, p. 109119, 2019.
[10] V. Parkash and S. Singh, "A review on potential plant-based water stress indicators for vegetable crops," Sustainability, vol. 12, no. 10, p. 3945, 2020.
[11] H. Benyezza, M. Bouhedda, and S. Rebouh, "Zoning irrigation smart system based on fuzzy control tech-nology and IoT for water and energy saving," Journal of Cleaner Production, vol. 302, p. 127001, 2021.
[12] N. Abdullah et al., "Towards smart agriculture monitoring using fuzzy systems," IEEE Access, vol. 9, pp. 4097–4111, 2020.
[13] N. S. Pezol, R. Adnan, and M. Tajjudin, "Design of an Internet of Things (IoT) based smart irrigation and fertilization system using fuzzy logic for chili plant," in Proceedings of the 2020 IEEE International Con-ference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, Jun. 2020, pp. 69–73, doi: 10.1109/I2CACIS49202.2020.9140199.
[14] W. R. Mendes, F. M. U. Araújo, R. Dutta, and D. M. Heeren, "Fuzzy control system for variable rate irrigation using remote sensing," Expert Systems with Applications, vol. 124, p. 113424, 2019.
[15] L. Godo-Pla et al., "Control of primary disinfection in a drinking water treatment plant based on a fuzzy inference system," Process Safety and Environmental Protection, vol. 145, pp. 63–70, 2021.
[16] R. Liao et al., "Development of smart irrigation systems based on real-time soil moisture data in a green-house: Proof of concept," Agricultural Water Management, vol. 245, p. 106632, 2021.
[17] S. Rajendrakumar, V. K. Parvati, and R. Rajashekarappa, "Automation of irrigation system through em-bedded computing technology," in Proceedings of the 3rd International Conference on Cryptography, Se-curity and Privacy, Kuala Lumpur, Malaysia, Jan. 2019, pp. 289–293, doi: 10.1145/3309074.3309108.
[18] T. A. Khoa et al., "Smart agriculture using IoT multi-sensors: a novel watering management system," Journal of Sensor and Actuator Networks, vol. 8, no. 3, p. 45, 2019.
[19] J. Liu et al., "Tomato yield and water use efficiency change with various soil moisture and potassium levels during different growth stages," PLoS One, vol. 14, no. 3, p. e0213643, 2019.
[20] J. Yang et al., "A moisture-hungry copper complex harvesting air moisture for potable water and autono-mous urban agriculture," Advanced Materials, vol. 32, no. 39, p. 2002936, 2020.

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
The Authors submitting a manuscript do so on the understanding that if accepted for publication, copyright publishing of the article shall be assigned to Journal.